
Are you a roboticist working on mobile robots? Do you want your robots to collect 3D maps with semantic information about the surrounding objects?
Look no further! Check out our GitHub repository and discover COSE-MAP, an innovative Cooperative Semantic Mapping framework designed specifically for mobile robots.
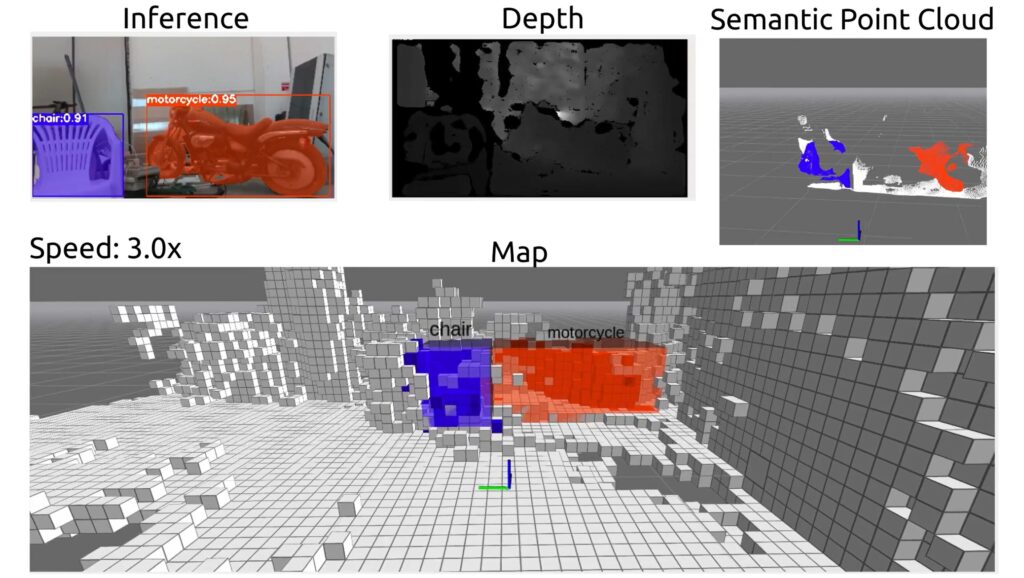
COSE-MAP leverages RGBD cameras to enable multiple robots to achieve the following tasks:
- Object Detection and Recognition in real 3D Environments: COSE-MAP empowers robots to identify and recognize objects within their surroundings.
- Unified Database Storage: the framework allows robots to store information in a unified database.
- Dynamic Map Creation at Runtime: by retrieving and combining information from the database, COSE-MAP generates detailed maps at runtime.
COSE-MAP is modular and flexible. You can use state-of-the-art instance segmentation algorithms (such as YOLO and Mask-RCNN). Memory usage is optimized by selectively storing instances and their locations, avoiding the need to memorize the entire map.
COSE-MAP is released as open source, benefiting the global robotics community.
Here is where it all started from.
If you’re considering adopting this novel framework, let us know! We welcome your feedback and are here to assist with integration into your code.