
Aitronik has joined the Open Source Robotics Alliance
We are thrilled to announce that AITRONIK has joined the Open Source Robotics Alliance (OSRA) as an Inaugural Member! After utilizing the best open software for robotic applications for years, this membership represents a commitment to promote its adoption worldwide. Tools like ROS, ROS2, Gazebo, and OpenRMF have allowed roboticists to speed up the development […]
SALVO is publicly released
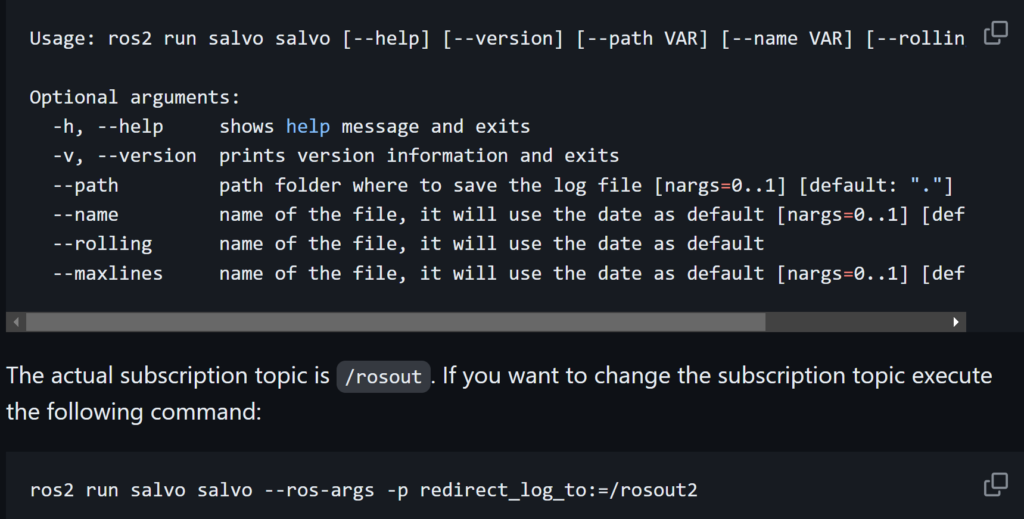
We are pleased to announce that SALVO, an open-source software for abstracting data logging middleware-specific function calls, has been released and is publicly available to the open-source community. At Aitronik we are committed to providing robotization services to increase safety and efficiency of operations where vehicles are involved. We deliver top-notch custom software and provide integration […]