
Novel Cooperative Semantic Mapping for Mobile Robots
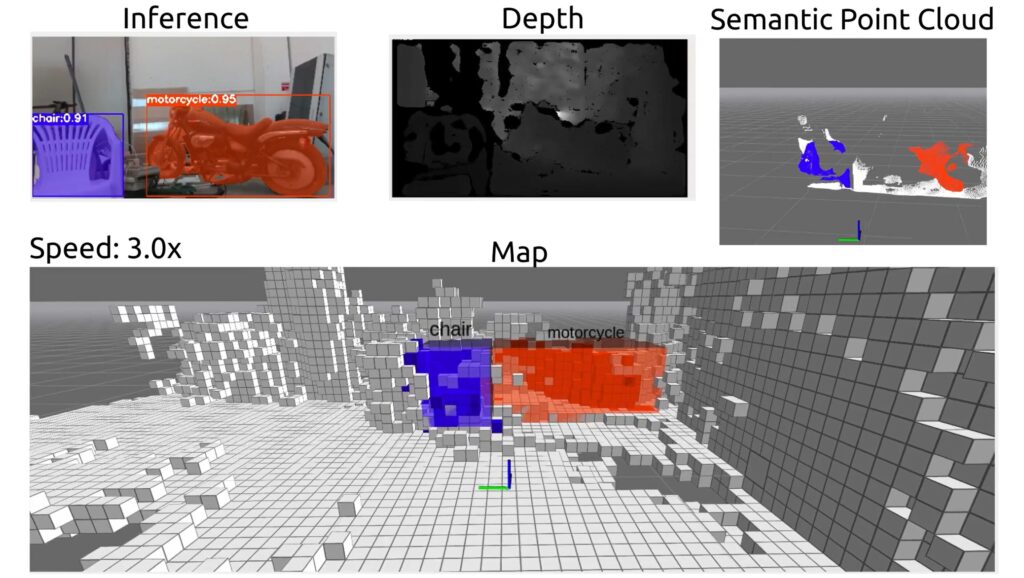
Are you a roboticist working on mobile robots? Do you want your robots to collect 3D maps with semantic information about the surrounding objects?Look no further! Check out our GitHub repository and discover COSE-MAP, an innovative Cooperative Semantic Mapping framework designed specifically for mobile robots. COSE-MAP leverages RGBD cameras to enable multiple robots to achieve […]