
Novel Cooperative Semantic Mapping for Mobile Robots
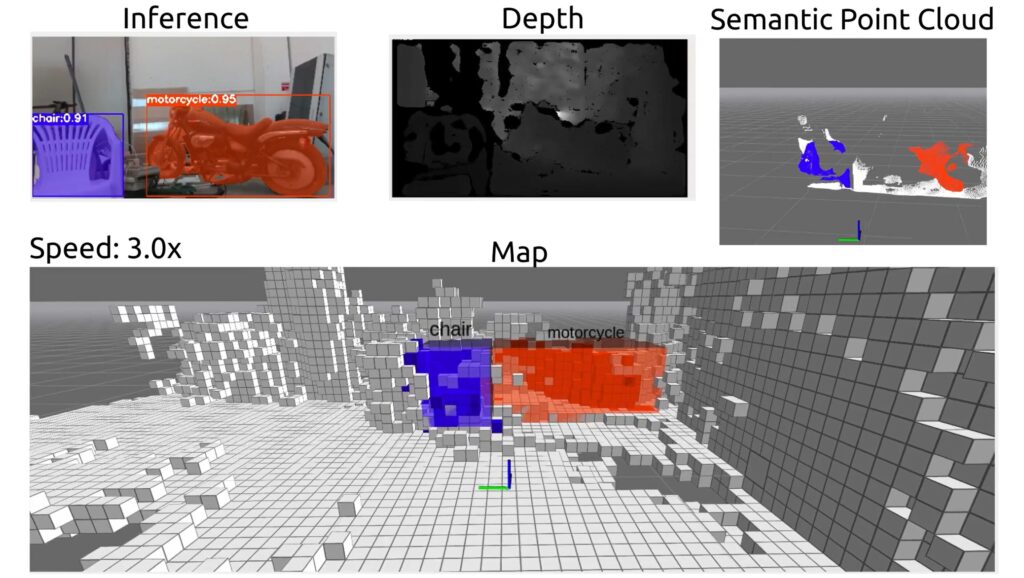
Are you a roboticist working on mobile robots? Do you want your robots to collect 3D maps with semantic information about the surrounding objects?Look no further! Check out our GitHub repository and discover COSE-MAP, an innovative Cooperative Semantic Mapping framework designed specifically for mobile robots. COSE-MAP leverages RGBD cameras to enable multiple robots to achieve […]
Aitronik has joined the Open Source Robotics Alliance
We are thrilled to announce that AITRONIK has joined the Open Source Robotics Alliance (OSRA) as an Inaugural Member! After utilizing the best open software for robotic applications for years, this membership represents a commitment to promote its adoption worldwide. Tools like ROS, ROS2, Gazebo, and OpenRMF have allowed roboticists to speed up the development […]
Aitronik receives the EU Association of Aerospace Eng. Students

At Aitronik, we believe that training and sharing represent two fundamental tools for the growth of people and teams. This is why we love hosting training workshops and sharing experiences. And it is in this spirit that on Monday, April 8, we received the visit from EUROAVIA Pisa. This nonprofit association is based at the […]
Back from the European Robotics Forum 2024 in Rimini

We’re back from the European Robotics Forum 2024, held in Rimini from 13 to 15 March. Among artificial dogs, humanoids, and collaborative AGVs, research institutions and robotics companies showcased at ERF their innovations in the field of robotics. In the meantime, inspiring keynote speeches and workshops shared the latest great results the robotics community has […]
Prof. Vincenzo Ferrari talks about Mixed Reality for surgery

Last Thursday we had the pleasure of hosting Prof. Vincenzo Ferrari, associate professor of Biomedical Engineering at the Department of Information Engineering at the University of Pisa. Continuing the in-house training with thematic workshops held by academics, this time we explored and shared approaches based on Augmented Reality and Computer Vision. Vincenzo Ferrari is a […]